FAST角点
原理
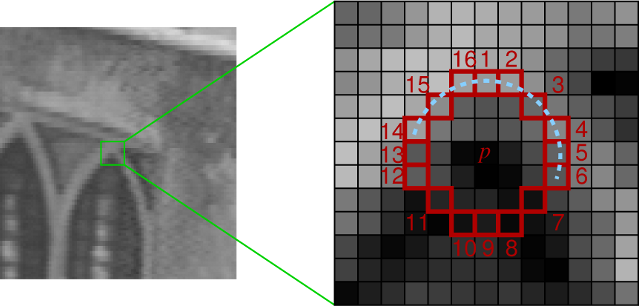
step 1: 以p点为中心,考虑半径为3的圆上,一共有16个点,编号为1到16。
step 2: 设定一个灰度阈值,在点{1,5,9,13}中,如果有3个点和中心点灰度差绝对值大于阈值,则定为候选点,否则直接排除。
step 3: 对于候选点,如果存在连续9个点和中心点灰度差绝对值大于阈值,则认为是角点。
step 4: 非最大值抑制,16个点与中心点灰度差绝对值之和为FAST得分,对于一个特征点,如果角点附近(3x3或者5x5)存在其他角点,则比较FAST得分,如果当前点不是最大的,则抑制,否则保留。
优缺点
优点:计算量小
- http://www.edwardrosten.com/work/fast.html
- E Rosten, Machine learning for high-speed corner detection, 2006
